
Uber self driving problems before fatal crash tempe arizona autonomous cars – Uber self-driving problems before the fatal crash in Tempe, Arizona highlight critical issues with autonomous cars. This incident, involving an autonomous vehicle, underscores the complexities of implementing self-driving technology. The accident prompted immediate investigations into the vehicle’s systems, bringing into sharp focus the challenges and potential dangers associated with this emerging technology. Initial reports and public perception were understandably concerned, prompting scrutiny of safety protocols and technological advancements.
This exploration delves into the intricate details of the Tempe accident, examining the self-driving technology itself, potential malfunctions, and safety concerns. We’ll analyze the various components of autonomous vehicle systems, including sensors, algorithms, and software. A crucial part of this investigation involves understanding the specific technology used in the involved vehicle and its limitations. Furthermore, we’ll consider the role of environmental factors and how they might have influenced the accident.
Introduction to the Tempe, Arizona Self-Driving Car Accident: Uber Self Driving Problems Before Fatal Crash Tempe Arizona Autonomous Cars
On February 19, 2018, a self-driving Uber vehicle was involved in a fatal accident in Tempe, Arizona. The incident involved a pedestrian crossing the street in a marked crosswalk, and highlighted the critical challenges and complexities of autonomous vehicle technology. This event sparked significant discussion about the safety and reliability of self-driving cars.The accident quickly became a focal point for the debate on the responsibility and liability associated with autonomous vehicles, especially concerning the interactions between technology and human actions in shared spaces.
The incident highlighted the potential for unexpected situations and the need for comprehensive safety protocols.
The Uber self-driving car accident in Tempe, Arizona, highlighted serious concerns about the safety of autonomous vehicles. While the recent official completion of the T-Mobile and Sprint merger t mobile and sprint merger officially completed is a significant telecom development, it doesn’t change the fact that further rigorous testing and safety protocols are crucial for the widespread adoption of self-driving technology.
Key Events and Vehicles Involved
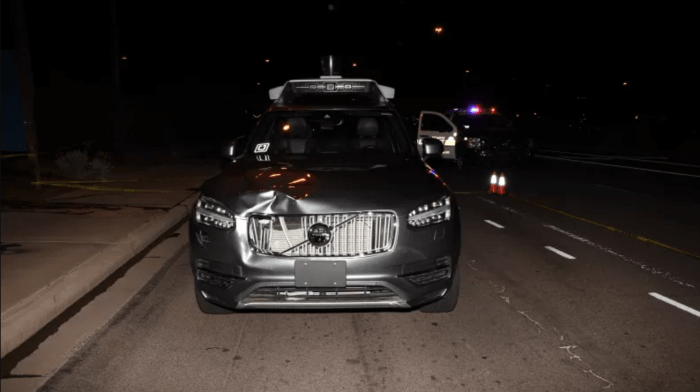
The Uber self-driving vehicle, equipped with a suite of sensors and software designed for autonomous navigation, was operating in a designated testing area. The vehicle was a modified Volvo SUV, and was operating under a supervised human safety driver. The pedestrian was crossing the street at a marked crosswalk. Initial reports suggested the vehicle was traveling at a relatively low speed, but the exact circumstances leading to the collision remain under investigation.
Immediate Aftermath of the Accident, Uber self driving problems before fatal crash tempe arizona autonomous cars
Following the accident, emergency responders immediately attended to the scene. The pedestrian was transported to a local hospital, where they succumbed to their injuries. The incident prompted a temporary halt in Uber’s self-driving testing operations in Tempe. The Tempe Police Department launched an investigation to determine the precise cause of the accident. Public reaction to the accident was mixed, with some expressing concern about the safety of autonomous vehicles, while others emphasized the need for continued development and refinement of the technology.
Initial Reports and Public Perception
Initial reports focused on the role of the human safety driver and the pedestrian’s actions. The public perception was largely one of concern and uncertainty regarding the reliability and safety of self-driving cars. The accident highlighted the complex interplay between human and machine decision-making in high-risk situations. The initial reporting, while attempting to be informative, also faced challenges in providing accurate and comprehensive details, potentially influencing the public’s understanding of the incident.
Autonomous Vehicle Technology Overview

The Tempe, Arizona accident involving a self-driving Uber vehicle highlights the complex interplay of technology and human factors in autonomous driving. Understanding the nuances of autonomous vehicle technology is crucial to assessing the potential risks and benefits of this rapidly evolving field. This exploration delves into the various components of self-driving cars, the different levels of autonomy, and the specific technology used in the involved vehicle, providing a more complete picture.Autonomous vehicle technology relies on a sophisticated suite of components working in concert to navigate and operate a vehicle without human intervention.
These components are interconnected and interdependent, creating a complex system where a failure in one area can have cascading effects on the entire system.
Components of Self-Driving Car Technology
The core components of autonomous vehicles include sensors, algorithms, and software. These elements work together to enable the vehicle to perceive its environment, make decisions, and execute actions. Sensors are the eyes and ears of the vehicle, providing data on its surroundings. Algorithms interpret this data, determining the best course of action, and software executes these decisions.
- Sensors: Lidar, radar, cameras, and ultrasonic sensors are crucial for perception. Lidar uses lasers to create a detailed 3D map of the environment, radar detects objects using radio waves, cameras provide visual information, and ultrasonic sensors detect nearby objects, especially those at close range. Each sensor type has its strengths and weaknesses, and their combined use improves the vehicle’s overall perception of its surroundings.
The specific combination of sensors employed varies across different vehicles, impacting the system’s capabilities.
- Algorithms: These are the “brains” of the self-driving system. Sophisticated algorithms process sensor data to understand the environment, predict the behavior of other vehicles and pedestrians, and plan a safe driving route. These algorithms are trained on vast amounts of data, allowing the vehicle to learn and adapt to various driving situations. The accuracy and robustness of these algorithms are critical to the safety and reliability of autonomous vehicles.
Real-world scenarios, like the Tempe accident, highlight the need for continual refinement and improvement of these algorithms.
- Software: The software orchestrates the entire system, controlling the vehicle’s actuators (brakes, steering, acceleration) and managing communication between the different components. Software also manages the vehicle’s overall operation, ensuring safe and efficient driving. It plays a crucial role in interpreting and responding to the data collected by sensors and the commands generated by algorithms.
Levels of Autonomy
Different levels of autonomy reflect the degree of human intervention required for operation. These levels range from basic driver assistance features to fully autonomous operation.
- Level 0: No automation. The driver is fully responsible for all aspects of driving.
- Level 1: Driver assistance. The vehicle provides some driver assistance functions, such as adaptive cruise control or lane keeping assist.
- Level 2: Partial automation.
The vehicle can control some aspects of driving, like acceleration and braking, but the driver must remain engaged and ready to take control.
- Level 3: Conditional automation. The vehicle can handle most driving tasks under certain conditions (e.g., clear weather, limited traffic), but the driver must be ready to take control immediately if needed.
- Level 4: High automation. The vehicle can handle all driving tasks under most conditions, requiring minimal or no driver intervention.
- Level 5: Full automation. The vehicle can handle all driving tasks under all conditions without any human intervention. This level is considered fully autonomous.
Specific Technology in the Tempe Accident Vehicle
Detailed information about the specific technology used in the Uber vehicle involved in the Tempe accident is crucial to understanding the event. Unfortunately, public information about the exact sensors, algorithms, and software is limited. However, given the level of autonomy claimed for the vehicle, it is reasonable to assume that it employed advanced sensors like cameras, lidar, and radar, as well as complex algorithms for object detection, classification, and path planning.
Furthermore, it would have relied on software to manage the vehicle’s actuators and maintain overall system control.
- Limitations: Despite the sophisticated technology, limitations exist. Unforeseen events, sensor malfunctions, and algorithm errors are possibilities. Environmental factors like sudden changes in weather or poorly maintained road conditions can also pose significant challenges. The Tempe accident highlights the need for continued research and development to enhance the robustness and reliability of autonomous vehicle systems. Furthermore, the interplay between the vehicle’s technology and the surrounding environment, including unexpected human behavior, is a key factor in determining the system’s effectiveness.
This emphasizes the importance of thorough testing and evaluation in real-world scenarios to identify and mitigate potential risks.
Potential Problems Leading to the Tempe Accident

The tragic Tempe, Arizona self-driving car accident highlighted critical vulnerabilities within autonomous vehicle technology. Understanding the potential contributing factors is crucial for refining safety protocols and ensuring the responsible development of this transformative technology. Examining potential malfunctions and environmental influences can illuminate areas requiring further investigation and improvement.The incident underscored the complexities of integrating advanced technology with unpredictable real-world scenarios.
Addressing potential system errors and the influence of environmental factors is paramount to developing robust and reliable autonomous driving systems.
Sensor Limitations and Data Processing Errors
Autonomous vehicles rely heavily on sensors, such as cameras, lidar, and radar, to perceive their surroundings. These sensors provide raw data, which sophisticated algorithms process to create a comprehensive understanding of the environment. Errors or malfunctions in the sensor systems or the algorithms interpreting that data can lead to flawed perceptions of the driving environment. For instance, inadequate sensor coverage, glare from the sun, or poor weather conditions can result in obscured or inaccurate data.
This data, if not correctly processed, can lead to the vehicle making incorrect decisions or failing to detect critical hazards. Furthermore, the accuracy of data interpretation depends on the sophistication of the algorithms.
Algorithm Deficiencies and Unexpected Scenarios
Autonomous driving algorithms are designed to handle a wide range of situations, but their ability to anticipate and react to unexpected events remains a challenge. Algorithms are trained on massive datasets of driving scenarios, but these datasets may not fully encompass the unpredictable nature of human behavior or unexpected environmental events. An algorithm might struggle to adapt to a situation not adequately represented in its training data.
A sudden, unanticipated maneuver by a pedestrian, for example, could be poorly interpreted, resulting in a failure to react appropriately.
Communication and Coordination Issues
Autonomous vehicles need to communicate effectively with other vehicles and infrastructure. Issues in communication protocols or signal interference can lead to misunderstandings or missed warnings. Moreover, if a vehicle fails to receive or correctly interpret messages from traffic signals or other vehicles, it could potentially lead to dangerous maneuvers. Delays or errors in data transmission between vehicles and the central control system can also cause a breakdown in the system’s coordination.
Environmental Factors
Environmental conditions can significantly impact the performance of autonomous vehicle systems. Weather conditions, such as heavy rain, snow, or fog, can impair the visibility and reliability of sensor data. Furthermore, road conditions, including uneven surfaces, construction zones, and debris, can cause issues with vehicle navigation and obstacle detection. Variations in lighting conditions, such as sudden changes in sunlight or heavy shadows, can also cause sensor systems to misinterpret the surroundings.
Human Factors and Supervision
Human factors are also a potential source of error in autonomous vehicle systems. While autonomous vehicles are designed to handle many tasks, human oversight and intervention remain critical for ensuring safety. The lack of adequate human supervision in the Tempe incident highlights the importance of safety protocols and response mechanisms. In particular, the lack of a properly trained operator who can take over in critical situations could be a major contributing factor.
Safety and Reliability of Autonomous Vehicles
Autonomous vehicles are rapidly evolving, promising a future of safer and more efficient transportation. However, the transition to widespread adoption requires robust safety mechanisms and rigorous testing procedures to mitigate risks and ensure reliability. The recent Tempe, Arizona accident highlights the critical need for continuous improvement in autonomous vehicle technology and safety protocols.
Comparison of Safety Features Across Autonomous Vehicle Systems
Different autonomous vehicle systems employ varying levels of safety features. Comparing these features provides insight into the current state of the technology and the potential areas for future improvements.
| Vehicle System Type | Sensor Suite | Redundancy | Emergency Response System | Data Logging and Analysis |
|---|---|---|---|---|
| Level 2 (Driver Assistance) | Cameras, radar, ultrasonic sensors | Limited redundancy | Limited emergency intervention; primarily driver-dependent | Basic data logging for diagnostics |
| Level 3 (Conditional Automation) | Sophisticated sensor fusion (cameras, radar, lidar) | Redundant sensor systems | Automatic intervention in specific conditions, e.g., lane departure | Extensive data logging for system performance analysis |
| Level 4 (High Automation) | Highly sophisticated sensor suite including lidar, cameras, and GPS | Redundant sensor and control systems | Automated emergency responses, including braking and steering interventions | Comprehensive data logging, including situational awareness and decision-making |
| Level 5 (Full Automation) | Advanced sensor technology with extensive mapping and localization | Highly redundant and robust control systems | Fully automated emergency responses based on predefined protocols | Real-time data analysis and feedback loops for continuous improvement |
Autonomous Vehicle Testing and Validation Procedures
Rigorous testing and validation procedures are essential for ensuring the reliability and safety of autonomous vehicles. These procedures vary based on the level of autonomy.
- Testing Environments: Autonomous vehicle systems are tested in various environments, including simulated and real-world scenarios. Simulations help to test various situations in controlled settings, while real-world testing provides valuable insights into how the system handles unexpected events and environmental factors. Realistic testing environments are crucial to assess the system’s ability to cope with unpredictable scenarios, such as pedestrians, cyclists, or unforeseen obstructions.
- Safety Protocols: Safety protocols must be established and followed during both simulated and real-world testing. These protocols detail the procedures for handling potential incidents and emergencies, and for analyzing data to identify areas for improvement. Clear and consistent safety protocols are critical to minimizing risks during the development and testing phases of autonomous vehicles.
- Data Analysis: Extensive data analysis is performed to identify potential hazards and refine algorithms. The analysis helps to assess the system’s performance in different scenarios and identify areas for improvement. Data analysis is crucial to understand the limitations of the system and refine algorithms to improve safety and reliability.
Differing Safety Testing Methodologies Across Autonomous Vehicle Levels
The methodology of safety testing varies depending on the level of autonomy. Higher levels of autonomy necessitate more sophisticated testing methods and procedures.
- Level 2 Testing: Testing focuses primarily on specific functionalities, such as lane keeping and adaptive cruise control, under controlled conditions. These tests prioritize the system’s ability to execute pre-programmed functions.
- Level 3 Testing: Testing includes more complex scenarios, such as highway driving and merging, with greater focus on the system’s ability to handle unforeseen situations and make appropriate decisions.
- Level 4 Testing: Testing requires extensive real-world testing in various environments and situations. Simulation and data analysis play a critical role in identifying potential risks and refining the system’s decision-making capabilities. The focus is on evaluating the system’s performance under dynamic conditions and its ability to adapt to various environmental factors.
- Level 5 Testing: Testing includes highly complex and dynamic scenarios, aiming to evaluate the system’s ability to navigate in various environments and make autonomous decisions in complex and unpredictable situations. This level demands extensive simulations and real-world testing in different environments, including challenging weather conditions and diverse traffic patterns.
Public Perception and Ethical Considerations
The Tempe, Arizona accident involving a self-driving Uber vehicle highlighted the complex interplay between technology, public perception, and ethical dilemmas. The incident sparked a wide range of reactions, from concerns about the safety and reliability of autonomous vehicles to questions about liability and the very nature of responsibility in automated systems. Understanding these public perceptions and the ethical considerations they raise is crucial for the responsible development and deployment of autonomous vehicle technology.The public’s reaction to self-driving car accidents often hinges on the perceived level of control and human oversight.
When a mishap occurs, public trust can quickly erode, as seen in the aftermath of accidents involving Tesla’s Autopilot system, or other autonomous vehicles. The perception of a system failing in a critical moment can lead to public skepticism and calls for stricter regulations.
Public Reactions to Self-Driving Car Accidents
Public reactions to self-driving car accidents are varied and often influenced by pre-existing biases and assumptions about the technology. Initial reactions may range from disbelief and fear to outrage and distrust, particularly if the accident involves a fatality. For example, the public response to the Tesla Autopilot incidents often involved discussions of the level of driver engagement and the degree of responsibility shouldered by both the driver and the vehicle’s software.
Ethical Dilemmas in Autonomous Vehicles
Autonomous vehicles present a unique set of ethical dilemmas that traditional vehicles do not. These dilemmas often involve choosing between different undesirable outcomes, a challenge inherent in designing algorithms for autonomous vehicles. This complexity is highlighted in the following table:
| Ethical Dilemma | Potential Impact on Society |
|---|---|
| Accident Avoidance | Autonomous vehicles must be programmed to make decisions in split seconds. These decisions may lead to injuries or deaths. Who is held responsible? The manufacturer? The user? Or the system itself? |
| Prioritizing Lives | Autonomous vehicles must prioritize certain lives over others in accident scenarios. This could lead to unfairness or discrimination, or a sense of inequality and societal divisions. |
| Data Privacy | Autonomous vehicles collect significant data about their surroundings and user behavior. Protecting this data from misuse is critical, but the need for data collection for vehicle functioning creates an inherent tension. |
| Liability and Responsibility | Determining liability in accidents involving autonomous vehicles is complex. Should the manufacturer, the user, or the software be held responsible? Legal frameworks need to adapt to address these novel scenarios. |
| Lack of Transparency | The algorithms used by autonomous vehicles can be complex and opaque. A lack of transparency in the decision-making processes of these vehicles can lead to public mistrust and difficulty in accountability. |
Legal and Regulatory Frameworks for Autonomous Vehicles
Current legal and regulatory frameworks are struggling to keep pace with the rapid advancements in autonomous vehicle technology. Existing laws, often designed for human-driven vehicles, lack specific provisions for autonomous vehicles, creating a legal grey area. For example, who is responsible if an autonomous vehicle causes an accident? How are these vehicles insured? What is the role of human oversight?
Uber’s self-driving car issues in Tempe, Arizona, before the fatal crash highlighted some serious concerns about the technology. It’s a complex problem, requiring not just better software but also a deeper understanding of how humans interact with these autonomous vehicles. Interestingly, Belkin’s ventilator partnership with the FDA and the University of Illinois’ FlexVent project here showcases how innovative solutions can improve safety in different sectors.

Ultimately, the challenges of autonomous vehicles, like those faced by Uber, demand a multifaceted approach to ensure the technology is safe and reliable.
These questions highlight the need for updated legislation and standards. International collaboration is also necessary to ensure consistency and safety standards across different jurisdictions.
“The development of autonomous vehicle technology demands a collaborative effort from researchers, engineers, policymakers, and the public to ensure the safe and ethical deployment of these systems.”
The Future of Autonomous Vehicles
The Tempe, Arizona accident, while tragic, highlights the complex challenges in the path towards fully autonomous vehicles. While significant progress has been made in the field of autonomous driving, the journey to widespread adoption necessitates continued research, development, and a proactive approach to mitigating potential risks. The future of autonomous vehicles hinges on the ability to overcome these challenges and build public trust.The development of autonomous vehicles is an ongoing process, demanding a multifaceted approach that considers not only technological advancements but also societal implications and ethical considerations.
Addressing the specific issues raised by the Tempe accident is crucial for building confidence in the technology and paving the way for a future where autonomous vehicles are safely integrated into our transportation systems.
Ongoing Research and Development Efforts
Significant research and development efforts are focused on improving the safety and reliability of self-driving cars. These efforts involve refining sensor technology, enhancing algorithms for decision-making in complex situations, and creating robust safety systems. The primary focus is on developing systems that can adapt to unpredictable scenarios, learn from real-world experiences, and enhance the overall safety and reliability of autonomous driving.
This includes advancements in lidar, radar, and camera technology, along with improvements in AI algorithms that process and interpret the vast amounts of data collected by these sensors. Researchers are also exploring new approaches to address limitations in current technology, such as developing more resilient systems that can handle unexpected environmental conditions.
Potential Solutions to Mitigate Risks
Various solutions are being explored to mitigate the risks associated with autonomous vehicles. These include incorporating redundant sensor systems to reduce reliance on a single sensor type, implementing more sophisticated and comprehensive algorithms that account for various possible scenarios and potential errors, and incorporating human oversight and intervention mechanisms, such as remote human monitoring and control options. For example, some systems are being designed to allow human drivers to take control of the vehicle in critical situations.
Societal Impact of Fully Autonomous Vehicles
The societal impact of fully autonomous vehicles is expected to be substantial. It could lead to significant changes in transportation, logistics, and urban planning. Potential positive impacts include increased mobility for people with disabilities, reduced traffic congestion, and improved fuel efficiency. For example, autonomous delivery systems could revolutionize logistics, leading to reduced delivery times and costs. However, the potential for job displacement in sectors like trucking and taxi driving requires careful consideration and proactive strategies to mitigate these potential negative consequences.
Furthermore, the impact on urban environments, such as parking requirements and traffic flow, needs to be assessed. New infrastructure and policies may be necessary to accommodate these changes effectively.
Uber’s self-driving car woes in Tempe, Arizona, before the fatal crash highlight some serious issues with autonomous vehicles. While we’re all eager to see the future of transportation, it’s crucial to understand the challenges. For instance, checking out the Samsung Galaxy S10e’s price, size differences, and cheap hands-on photos at samsung galaxy s10e price size differences cheap hands on photos can be a great distraction, but ultimately, safety in autonomous vehicles should be the top priority in all of these ongoing development efforts.
Illustrative Case Studies
The Tempe, Arizona accident, while a singular event, highlights a broader concern about the safety and reliability of autonomous vehicle technology. Analyzing past incidents, and the factors that contributed to them, is crucial for understanding the challenges and potential pitfalls of self-driving cars. Examining these cases can offer valuable lessons, guiding future development and ultimately enhancing the safety of autonomous systems.
Past Self-Driving Car Accidents: A Detailed Look
Examining past accidents provides a critical lens through which to understand the limitations of current autonomous vehicle technology. These incidents offer a wealth of data, allowing us to identify recurring themes and patterns. Analysis of these accidents helps us to understand the complexities of operating autonomous vehicles in real-world scenarios.
Contributing Factors in Accidents
Several factors often contribute to self-driving car accidents. These include, but are not limited to, inadequate sensor data, malfunctioning algorithms, and limitations in environmental perception. For example, poor weather conditions or unexpected pedestrian behavior can cause autonomous vehicles to misinterpret the situation and react inappropriately.
Sensor Limitations and Data Processing
Autonomous vehicles rely heavily on sensor data, such as from cameras, lidar, and radar, to perceive their surroundings. Inadequate sensor performance, or a failure to accurately interpret sensor data, can lead to accidents. A failure to account for objects obscured by shadows or other vehicles, for example, can result in a collision. Likewise, the resolution of sensors can affect the accuracy of the data and ultimately the decision-making process of the vehicle.
Algorithm Errors and Software Bugs
Software errors and algorithm failures can also contribute to autonomous vehicle accidents. An autonomous vehicle may make incorrect decisions based on flawed or incomplete data. For instance, a software bug may cause the vehicle to misinterpret a traffic signal or fail to properly predict the actions of other drivers.
Environmental Factors and Unexpected Situations
The environment in which autonomous vehicles operate is constantly changing. Unexpected situations, like sudden changes in traffic flow or the unpredictable behavior of pedestrians, can challenge the capabilities of the vehicle’s algorithms. These scenarios can stress the system, sometimes leading to errors. For example, a sudden detour of a cyclist, not detected by the vehicle’s sensors, can lead to a collision.
Lessons Learned from Incidents and Technological Improvements
Past accidents have highlighted areas needing improvement in autonomous vehicle technology. Analysis of these incidents has driven significant advancements in sensor technology, algorithm development, and vehicle safety systems. This includes improvements in the accuracy of object detection, and enhancements in the ability of autonomous systems to react to unexpected situations.
Accident Data Utilization for System Improvement
Accident data is critical for improving autonomous vehicle systems. By analyzing the causes of past accidents, researchers and engineers can identify patterns and develop strategies to enhance safety. This involves a continuous feedback loop where data from accidents informs future development and testing protocols. Statistical analysis of accident data can identify areas where algorithms or sensor technology require improvement.
The insights gleaned from these analyses are then used to refine the algorithms and enhance the overall safety of the vehicles.
Closure
The Uber self-driving crash in Tempe, Arizona serves as a critical case study, raising important questions about the safety and reliability of autonomous vehicles. This incident underscores the need for rigorous testing, enhanced safety protocols, and ongoing research to mitigate risks. While the technology shows promise, there’s still a significant path to achieving the safety and reliability necessary for widespread adoption.
The incident also illuminates public concerns and ethical dilemmas associated with these vehicles, prompting important discussions about legal frameworks and societal implications. Ultimately, this tragedy emphasizes the importance of continued vigilance, innovation, and robust safety measures as autonomous vehicles continue their evolution.
